Next-Gen SLAM
Mapless Prediction and Planning
Interaction-aware Decision-making
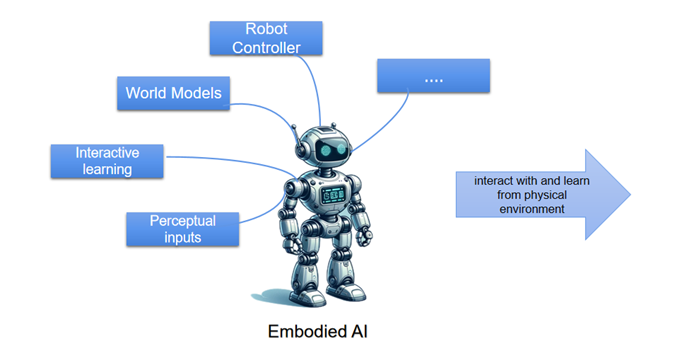
Scene Understanding and Embodied AI
Next-Gen SLAM
- Semantic SLAM System for Urban Driving or Memory Parking
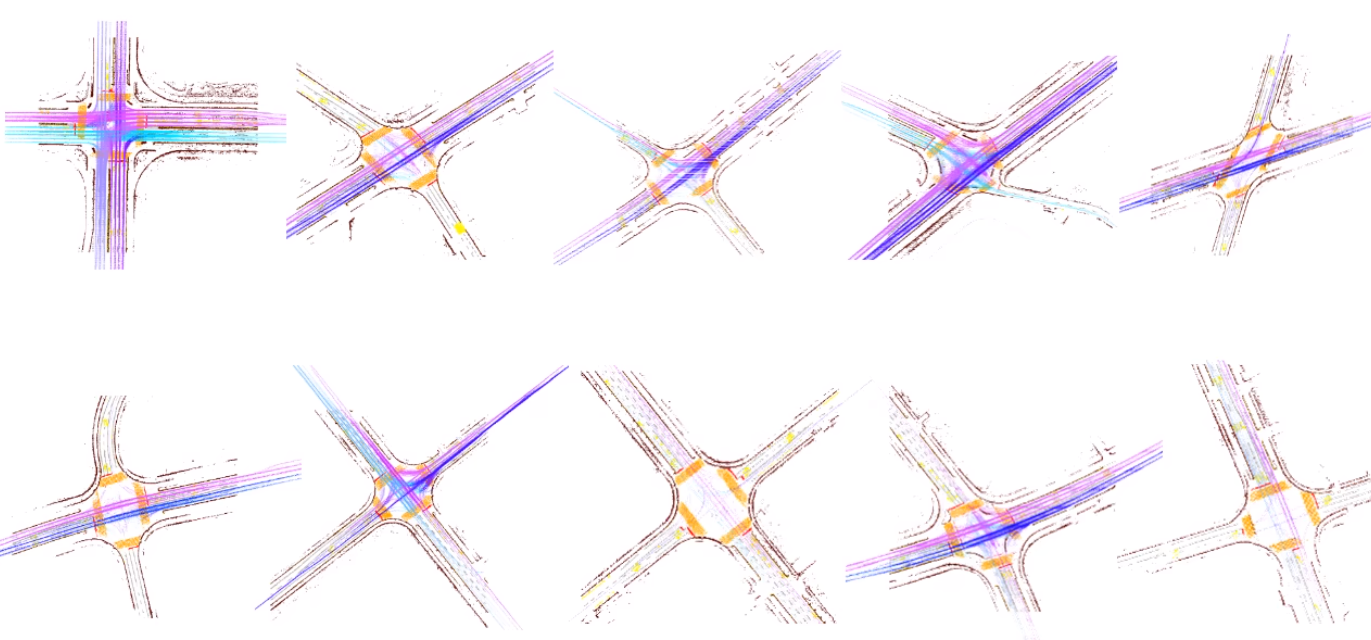
- Path Generation for Automated Vehicles in Open Space Using Traffic Flow

- Automated Annotation for Open Scene Datasets
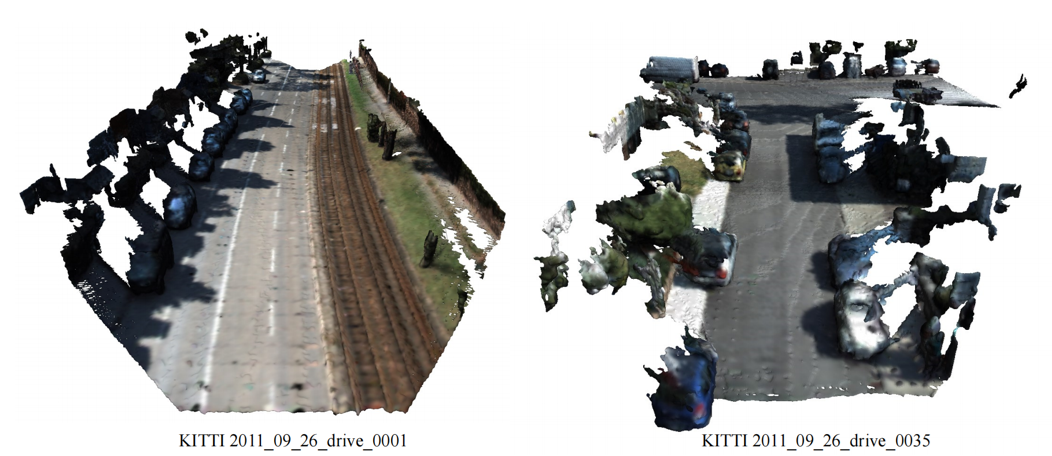
- Neural Implicit Representation for Open Scenes
Mapless Prediction and Planning
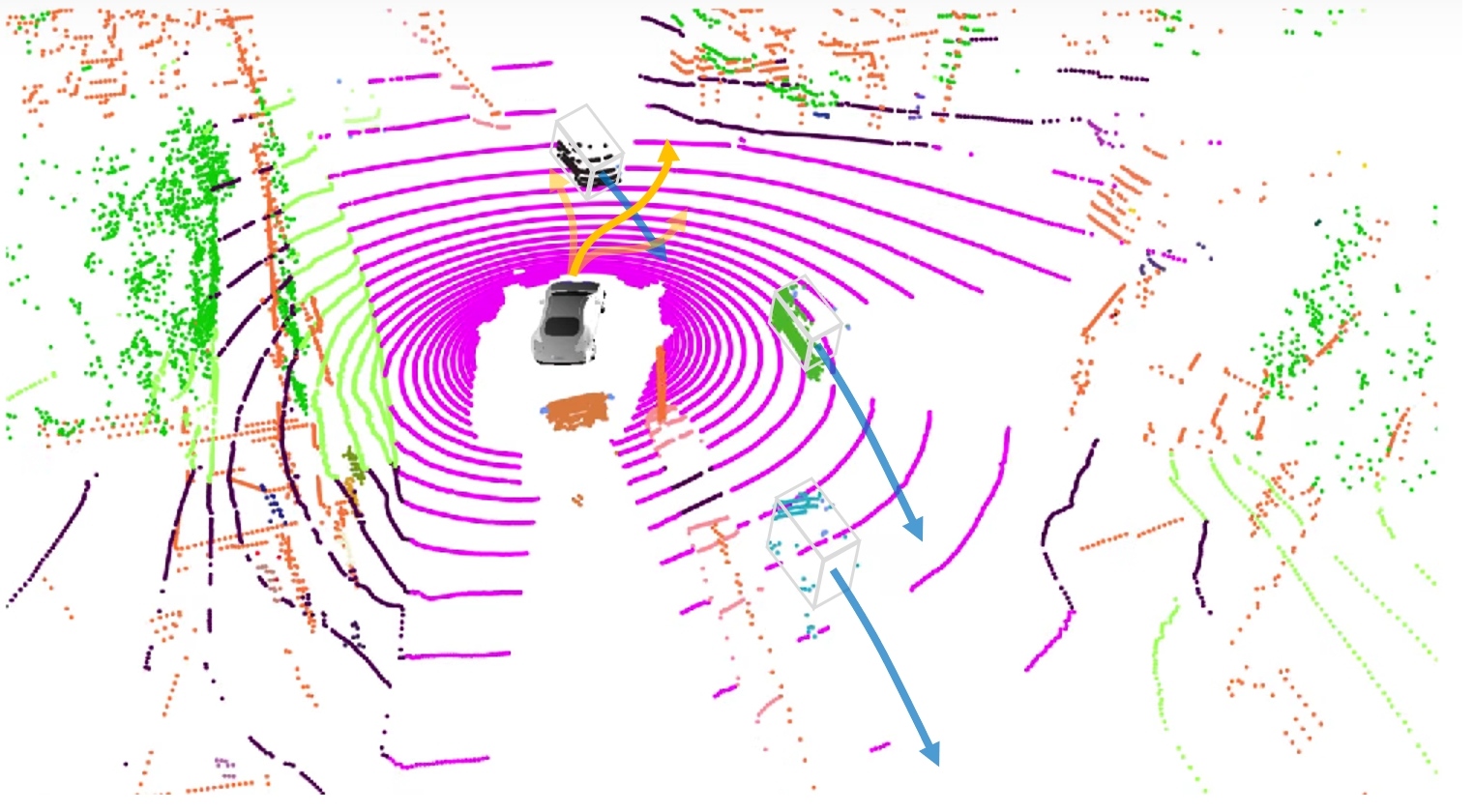
- Lane selection and planning algorithms under uncertainty perception
- Prediction and planning without HD map
Interaction-aware Decision-making
- An Efficient Planning System for Automated Vehicles in Highly Interactive Environments
- Safe trajectory generation in convex corridors with safety guarantee
- Efficient Uncertainty-aware Decision-making for Autonomous Vehicles Using Guided Branchin
Scene Understanding and Embodied AI
Embodied AI refers the overall need and function of interacting with the environment,which means that robots should learn by observing, moving, talking, and interacting with the world just like humans do.However, existing scene understanding mainly focuses on analyzing images passively and the semantic understanding of the scenario is separated from the interaction between the agent and the environment. By bridging the gap between passive observation and active interaction, embodied agent can redefine the benchmarks and capabilities of intelligent systems in complex environments.